#자율주행 #차선검출 #openCV #canny #분노의질주 #아이스크림 #자율주행차

과속의 더 익스트림 영화를 영화 소개 방송에서 봤다. 거기서 자율주행차 해킹 영상이 나온다. 이 영상을 보면서 자율주행 자동차에 대해 다시 한번 생각해본다. 어떻게 하면 더 안전한 자율주행차를 이용할 수 있을까?

자율주행차 시대, 걱정을 사서 하는 기자의 쓸데없는 칼럼[과학기자 문화산책] 영화 ‘분노의 질주: 더 익스트림’을 보고 ※ 이 칼럼에는 영화 ‘분노의 질주: 더 익스트림’에 대한 내용이 담겨 있습니다. 줄거리상 스포일러는 없지만 민감하신 분들은 영화를 보신 후 읽어주세요.m.dongascience.donga.com
인기글




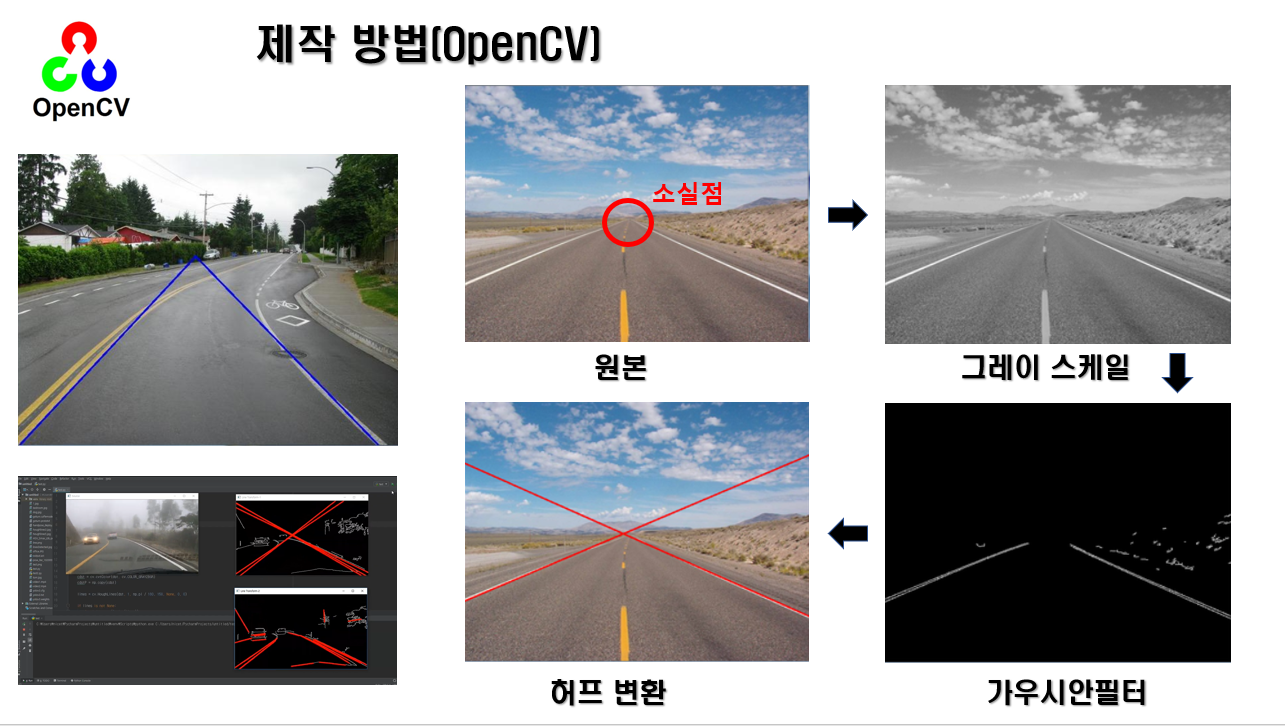
우선 자동 운전 차는 실시간으로 필요한 정보를 처리해야 한다. 전회 numpy를 이용한 방법은 차선 엣지를 어디까지 시간이 너무 걸렸다.시간을 단축하는 방법은 없을까?openCV함수를 사용하고 다시 프로그램을 수정했다.import cv2import numpy as np#image0=cv2.imread(“roadtest.jpg”)image0=cv2.imread(“roadtest2.jpg”)gray=cv2.cvtColor(image0, cv2.COLOR_BGR2GRAY)image=cv2.GaussianBlur(gray,(3,3), 0)Laplacian=cv2.Laplacian(image, cv2.CV_32F, 1)sobel_x=cv2.Sobel(np.float32(image), cv2.CV_32F, 0,1,3)sobel_y=cv2.Sobel(np.float32(image), cv2.CV_32F, 1,0,3)3)Canny=cv2.Canny(image, 130,150)cv2.imshow(“image”, image)Laplacian_img=cv2.convertScaleAbs(Laplacian)cv2.imshow(“Laplacian”, Laplacian_img)cv2.imwrite(“Laplacian0.jpg”, Laplacian_img)sobel_x_img=cv2.convertScaleAbs(sobel_x)cv2.imshow(“sobel_x”, sobel_x_img)cv2.imwrite(“soble_x0.jpg”, sobel_x_img)sobel_y_img=cv2.convertScaleAbs(sobel_y)cv2.imshow(“sobel_y”, sobel_y_img)cv2.imwrite(“sobel_y0.jpg”, sobel_y_img)cv2.imshow(“canny”, Canny)cv2.imwrite(“canny.jpg”, Canny)cv2.waitKey()지난번보다 속도가 확실히 향상되었다.

그리고 이번에는 canny를 이용해 보았다.하한가와 상한치 두 변수만 주면 몇 번의 트라이얼 오류를 거쳐봐야 하지만 비교적 쉽게 사용할 수 있다.좀 더 다양한 연습 내용을 이어서 올려보려고 한다.